


摘要:為了驗證正交變傳動比面齒輪副設計的正確性, 用三軸數控機床加工正交變傳動比面齒輪。運用空間齒輪傳動嚙合理論及三軸數控機床的基本原理,建立了刀具與非圓齒輪的空間坐標系、正交變傳動比面齒輪加工坐標系、齒頂圓角模型以及數控加工模型。得到了刀具到非圓齒輪的坐標變換矩陣、非圓齒輪齒面到正交變傳動比面齒輪齒面的坐標變換矩陣、過渡曲面方程以及加工過程中刀具運動矩陣。用三軸數控機床加工正交變傳動比面齒輪,并對該齒輪副進行對滾實驗以及齒面測量實驗。實驗結果表明:三軸數控機床加工的正交變傳動比面齒輪齒面精度較高。證明了正交變傳動比面齒輪副設計以及三軸數控機床加工正交變傳動比面齒輪方法的正確性。
正交變傳動比面齒輪傳動是非圓齒輪與非圓面齒輪相互嚙合,相交軸為90°的齒輪傳動,可以實現相交軸之間的變傳動比運動。而面齒輪傳動是圓柱齒輪與面齒輪相互嚙合的齒輪傳動 。目前面齒輪傳動主要應用于直升機主減速器傳動裝置的分流傳動結構[2],應用范圍狹窄,其主要原因是:面齒輪設計復雜,加工精度不高,磨齒困難等。以上原因制約了面齒輪傳動的發展與應用。日本佐賀大學在面齒輪滾齒加工方面研究出一種少齒數的大螺旋滾齒刀加工面齒輪的方法 。波茲南科技大學對面齒輪的銑削加工方法做了研究 。Litvin研究團隊對面齒輪的研究做出了重要的貢獻 。我國對面齒輪研究起步較晚,尤其是面齒輪加工方面。近幾年,南京航空航天大學、西北工業大學等在面齒輪的磨齒方面 進行了研究,特別是南京航空航天大學在面齒輪磨削方面研究了蝸桿磨削面齒輪的方法 ;南京航空航天大學、西北工業大學等在面齒輪的插齒加工 方面做了研究。本文提出一種正交變傳動比面齒輪傳動,相比一般的面齒輪,可以實現變傳動比傳動。正交變傳動比面齒輪齒面在圓周方向的高度是變化的,不能用傳統的插齒機床加工。為了解決這種新型面齒輪的制造問題,本文探討該面齒輪的三軸數控加工方法,也為后續的研究打下基礎。
1 、正交變傳動比面齒輪的設計
1.1 正交變傳動比面齒輪加工原理
正交變傳動比面齒輪的加工刀具為漸開線圓柱齒輪,如圖1(a)所示。正交變傳動比面齒輪副實體如圖1(b)所示。
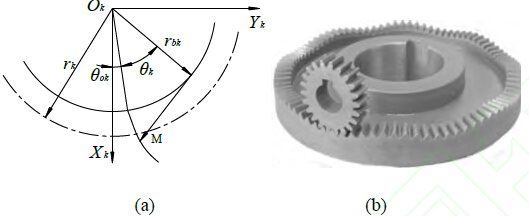
圖1 刀具的漸開線齒廓和正交變傳動比面齒輪副
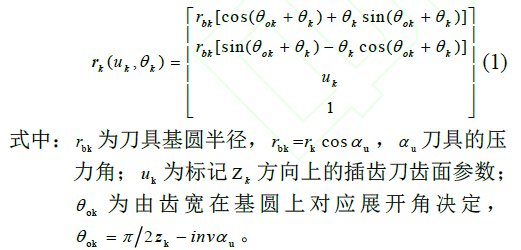
刀具的齒廓具有對稱性,只需表示出一半的齒廓,另一半可以通過對稱得到,刀具左齒廓方程表示為
![]()
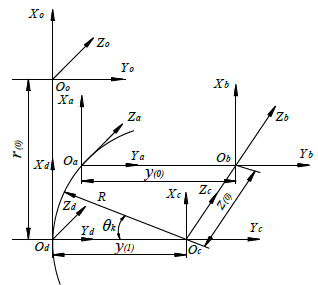
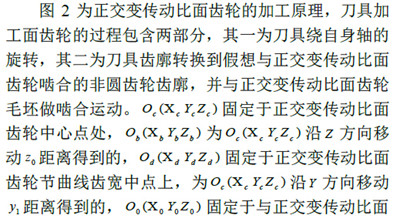
圖2 刀具與非圓齒輪的位置關系
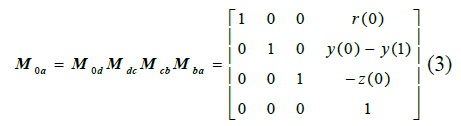
將刀具齒面方程的坐標系Sa 變換到假想與正交變傳動比面齒輪嚙合的非圓齒輪的坐標系So,齒廓的矢量表達式變為
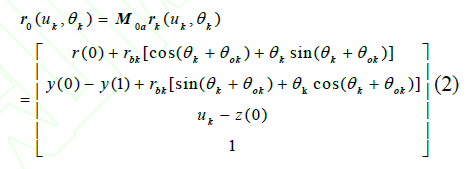
其中
1.2 正交變傳動比面齒輪齒面模型
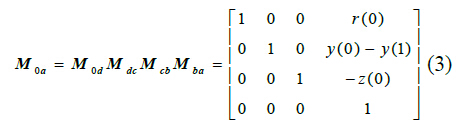

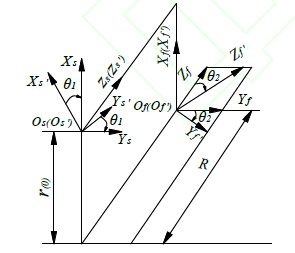
圖3 正交變傳動比面齒輪的加工坐標系
1.3 過渡曲面
加工刀具的齒頂角處存在圓角,圓角半徑為ρ,如圖4 所示,此時的過渡曲面,是由刀具齒頂圓角形成的。若在坐標系k 中,刀具齒頂圓角中心C 的坐標為(xc,yc),則刀具齒頂圓角的參數方程為
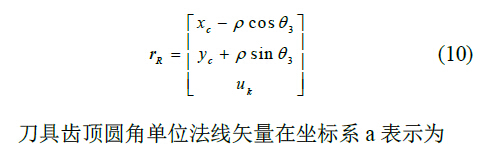

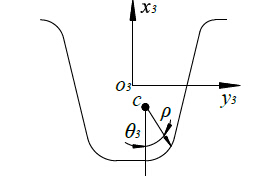
圖4 齒頂圓角
2 、正交變傳動比面齒輪的加工模型
正交變傳動比面齒輪每個齒廓不盡相同,需要三軸聯動以上的機床進行加工。本文探索的是三軸聯動數控機床加工該面齒輪的方法。機床模型如圖5 所示。
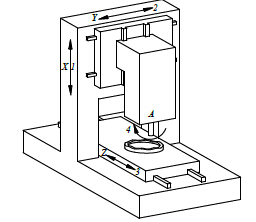
圖5 三軸數控機床模型
齒輪的加工取決于刀具與面齒輪毛坯的相對位置關系。為了確保其在坐標變換中相對位置與相對運動的正確性,需要建立刀具坐標系變換到工件坐標系的坐標變換矩陣,保證加工過程中數控軸控制刀具按照正確的運動關系運動,該變換矩陣為
根據 公式(18),可求得刀具在加工正交變傳動比面齒輪時的運動軌跡。刀具的走刀路線為由外圈走圓周逐步走到內圈。圖6為R取39mm、42mm、45mm時刀具運動軌跡在matlab中離散狀態點的位置分布圖。
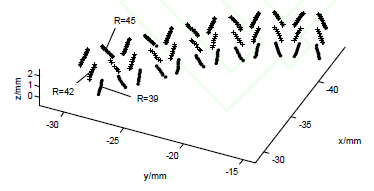
圖6 刀具離散狀態點
3 、加工實例
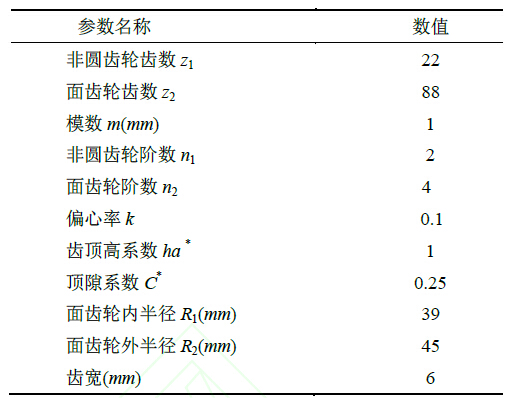
由于加工的復雜性,本次只加工最典型的卵形面齒輪,為了控制合理的齒輪尺寸,加工的非圓齒輪齒數較少,模數也較小,其具體的幾何尺寸參數如表1表所示。
表1 加工正交變傳動比面齒輪副幾何參數
加工的步驟包括毛坯開粗、齒槽去殘、齒面半精加工、過渡曲面半精加工、齒面精加工、過渡曲面精加工。齒面精加工過程如圖7 所示。
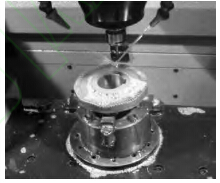
圖7 正交變傳動比面齒輪精加工
加工完成后,需要對正交變傳動比面齒輪的齒面精度進行測量,本文選用CNC 齒輪測量中心對加工的面齒輪進行測量,如圖8 所示。
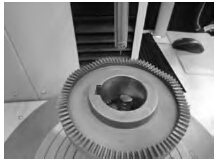
圖8 CNC 齒輪測量中心
由于正交變傳動比面齒輪每一個周期都存在波峰和波谷,波峰和波谷的齒面對整個面齒輪的齒面來說具有代表性。故分別選取一個波峰和一個波谷附近的齒進行誤差評定,將齒的左右齒面劃分為6x5 的網格,將理論齒面與測量所得齒面在網格上進行對比,沿著齒形法線方向,可得齒形法向偏差,并將偏差標注在6x5 的齒面網格上,如圖9 所示。
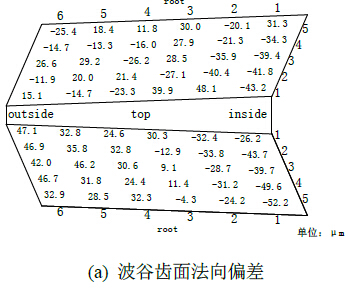
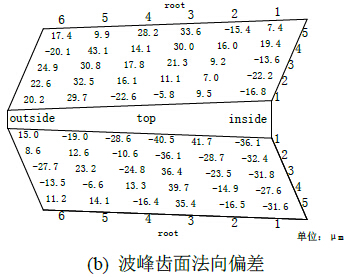
圖9 齒面法向偏差
由上可知齒1 的最大偏差為-52.2um,齒2 的最大偏差為39.7 um。綜上,三軸數控精銑法加工出的正交變傳動比面齒輪齒面有較高的精度。
完成正交變傳動比面齒輪的加工及相應的熱處理后,需要對加工的樣件進行對滾檢驗,驗證其相互嚙合滾動時,其接觸線是否與理論接近,圖7 為正交變傳動比面齒輪副在萬能對滾檢驗上進行對滾檢驗實驗。
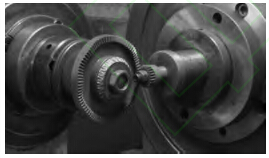
圖10 正交變傳動比面齒輪對滾檢驗
通過安裝及調整后,對滾實驗的結果表明,由三軸數控精銑法加工出的正交變傳動比面齒輪副的嚙合接觸軌跡良好,嚙合平穩。
4 、結論
1)建立了漸開線刀具的齒廓方程,通過坐標變換,得到了與正交變傳動比面齒輪嚙合的非圓齒輪的齒面方程,進而獲得了正交變傳動比面齒輪的齒面方程,確保了正交變傳動比面齒輪副的正確嚙合。
2)從刀具齒頂圓角參數方程出發,推導了正交變傳動比面齒輪齒根圓角方程,獲得了正交變傳動比面齒輪的齒面到齒根的平滑過渡曲面參數方程。
3)建立正交變傳動比面齒輪的數控加工模型,分析xyz 軸的運動關系,得到了制造中運動軸的參數表達式。利用三軸數控機床,完成了正交變傳動比面齒輪的加工。對滾試驗以及齒面檢測實驗顯示了該面齒輪副具有較好的嚙合狀態與較高的精度,證明了正交變傳動比面齒輪副設計以及三軸數控機床加工正交變傳動比面齒輪方法的正確性。
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com

